On the asymmetric troposphere modeling in PPP
Hauptberichter: Prof. Dr.-techn. Thomas Hobiger
Tag der mündlichen Prüfung: 28.11.2024
Veröffentlichung auf OPUS
Zusammenfassung:
Tropospheric asymmetry is a crucial error term which needs to be considered for the refinement of tropospheric modeling in Precise Point Positioning (PPP). Wet asym- metry can account for more than one-fifth of the wet delay, causing residuals rang- ing from centimeters to decimeters at low elevation angles. Tropospheric asymme- try significantly impacts high-precision positioning applications and meteorological research. First models of tropospheric asymmetry are based on the concept of tro- pospheric horizontal gradient, which has prompted the development of many new models, including the widely used two-axis gradient model. However, the tradi- tional two-axis gradient model is insufficient to represent the complex azimuthal variation of tropospheric delays. To address this issue, a directional mapping func- tion based on cyclic B-spline functions, the so called the B-spline Mapping Function (BMF), is proposed. BMF enables a continuous characterization of tropospheric de- lay across any azimuth direction. The effectiveness of BMF has been validated using both numerical weather model data and Global Navigation Satellite System (GNSS) data from International GNSS Service (IGS) stations in Europe and Africa. Results reveal that compared to the conventional gradient model, BMF improves coordinate repeatability by approximately 10% horizontally and 5% vertically. The improve- ment in 3D-RMSE can reach up to 15% under heavy rainfall conditions. While the functional model of the asymmetric troposphere has been extensively studied, the stochastic model of the asymmetric troposphere remains unexplored. The absence of a suitable stochastic model for asymmetric troposphere reduces the accuracy of positioning and Zenith Total/Wet Delay (ZTD/ ZWD) estimates. In this work, an Azimuth-Dependent Weighting (ADW) scheme is introduced with the pur- pose to adaptively weight GNSS observations affected by azimuth-dependent errors using parameters from asymmetric mapping functions. Validated using NWP and IGS data, ADW improves PPP solution coordinate repeatability by approximately 10% horizontally and 20% vertically. ADW also improves ZWD estimates during the PPP convergence period and yields smoother results. Thus, this new weight- ing scheme is recommended for PPP applications when the asymmetric mapping functions are used. In the currently used conventional PPP processing strategies, ZWD is usually dynamically estimated as a stochastic parameter. During the convergence period, ZWD could become negative due to the lack of physical constraints. This problem increases the convergence time and reduces short-term accuracy of PPP. To address this issue, a method which incorporates physical constraints on ZWD using Non- negative Least Squares (NNLS) methods and Karush–Kuhn–Tucker (KKT) condi- tions is proposed. This method reduces ZWD outliers during the PPP convergence period, and effectively improves the short-term accuracy for the Up component of the position up to 20%. Similar to tropospheric delays, there are some other systematic errors that also have azimuth-dependent characteristics, such as multipath error. Consequently, when using an asymmetric troposphere model, the gradient parameters may ab- sorb some of the multipath error, leading to biases in ZWD/ZTD estimates. Due to the site-specific nature of multipath errors, establishing a universal mathematical model is challenging. Therefore, in this thesis, a commercial simulator is employed to simulate multipath signals under different scenarios. The impact of multipath er- rors on estimated ZTD time series and methods to mitigate this effect by adjusting the process noise of ZWD are studied. This thesis provides an in-depth exploration of asymmetric troposphere model- ing in PPP from four perspectives: functional models, stochastic models, constraint conditions, and systematic errors. It investigates methods for refining troposphere modeling and analyzes their effectiveness in PPP and GNSS meteorology.
Precise orbit determination of agile and non-agile satellites
Hauptberichter: Prof. Dr.-techn. Thomas Hobiger
Tag der mündlichen Prüfung: 29.08.2024
Veröffentlichung auf OPUS
Zusammenfassung:
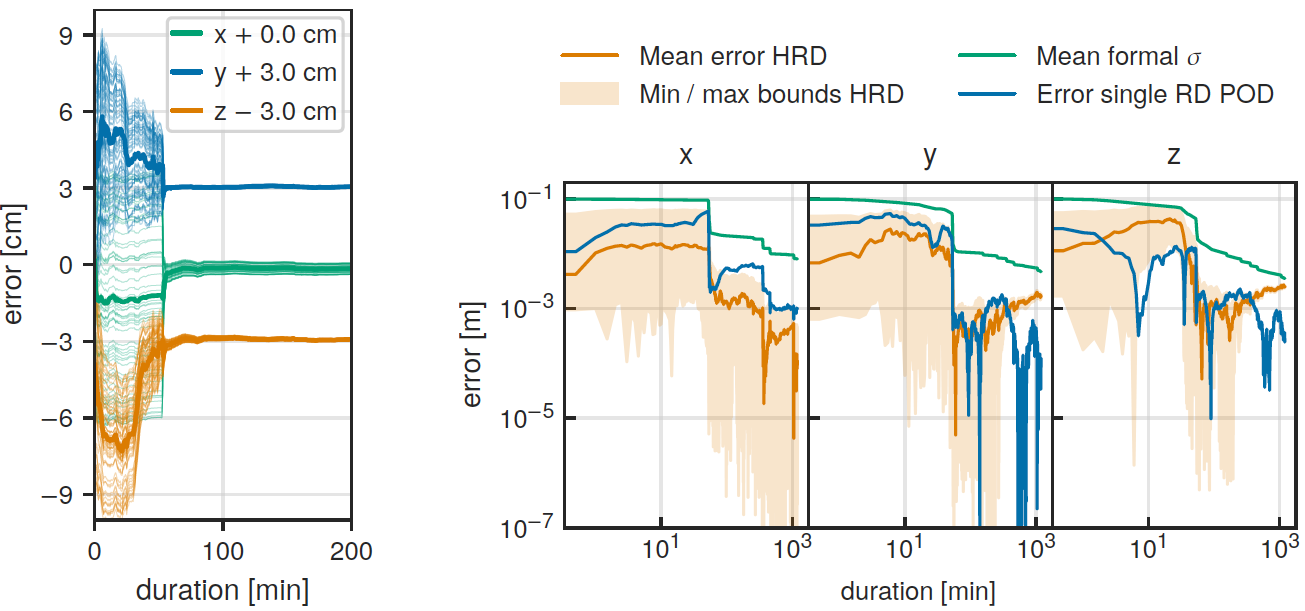
Precise orbit determination (POD) is key in fulfilling the scientific objectives of many Earth observation missions. For example, synthetic aperture radars (SARs) onboard low Earth orbit (LEO) satellites provide monitoring capabilities irrespective of lighting and weather conditions but are restricted in their field of view. Agile satellites, which can rapidly rotate around all three spacecraft axes, promise to overcome these limitations. The implications of a satellite’s agility on precise orbit determination have not yet been studied. However, their understanding and handling are crucial for the success of agile SAR missions. This thesis fills this gap by identifying the impact of agility on orbit determination, as well as devising and implementing ways to mitigate these effects. The novel software and its POD concept developed within this thesis are equally applicable to non-agile and agile satellites and are especially suited for extending to other or more numerous measurements in the future. The precise orbits of LEO satellites are most commonly determined from the abundant measurements collected by a global navigation satellite system (GNSS) receiver onboard the satellite. The newly developed C++ software Precise Orbit Determination for Complex and Agile Satellite Technology (PODCAST) pursues the reduced-dynamic orbit determination. This concept processes the GNSS observations combined with rigorous modeling of the satellite’s orbital dynamics. Additional accelerations are estimated to counteract remaining deficiencies in the dynamic models. Based on the measurements and models, the orbits are inferred using a sequential estimator, the extended Kalman filter (EKF). In contrast to common practice, this choice promises lower computational complexity and increased flexibility to incorporate more estimated parameters or measurements. While additional estimated variables can arise from the system’s agility, an increase in the observations is anticipated as the software is extended to new measurement types or multi-frequency multi-GNSS signals. The work offers an in-depth explanation of the employed methods, their rationale, and the new developments required by the EKF approach. A comprehensive study utilizing simulated and in-orbit measurements shows the influence of specific design considerations in POD based on the EKF. Certain shortcomings of this method are entirely circumvented by adhering to specific design criteria. The application to the LEO satellites Sentinel-3A, Sentinel-6A, and GRACE-FO further evidence the viability of using a sequential estimator. The derived orbits are competitive with other solutions derived by the more computationally demanding batch least-squares method. The impact of agility on GNSS-based reduced-dynamic orbit determination is assessed using simulations with realistic mission profiles. The rapid attitude changes of the satellite are shown to lead to a deterioration in the GNSS observables and increase the reliance on the dynamic model. Moreover, an analysis using GRACE-FO as a surrogate agile satellite suggests that the employed POD strategy effectively alleviates these changes, as well as the attitude-related errors in the non-gravitational force models. The results testify to the remarkable resilience of reduced-dynamic POD to measurement gaps caused by attitude maneuvers or jamming. Finally, errors in the lever arm - the vector between the GNSS antenna phase center and satellite center of mass - are shown to cause increased adverse effects for agile spacecraft. Furthermore, established techniques employed for satellites with slowly varying attitudes can only partially compensate for the negative impact on agile satellites. At the same time, using an observability analysis, Monte Carlo simulations, as well as in-orbit data of Sentinel-6A, this work proves the ability to directly estimate the lever arm in the presence of rapid attitude changes. Hence, this property enables dedicated attitude maneuvers to calibrate the lever arm for both agile and non-agile missions, thereby mitigating the negative effects on POD. Ultimately, this work presents an alternative precise orbit determination approach that is effective for both non-agile and agile missions. Compared to existing solutions, the derived orbits for non-agile satellites are consistent by approximately one centimeter. Applying the approach to in-orbit data of future agile satellites, which is not yet available, will enhance its verification and validation. Furthermore, the POD concept is well- suited to cope with upcoming challenges, such as an increasing number of measurements or parameters, and the fusion of various types of observations.